 |
NorMIT-nav
22.09
An IGT application
|
|
NorMIT-nav
22.09
An IGT application
|
Adapter class for ManualTool. More...
#include <cxManualToolAdapter.h>
Public Member Functions | |
| ManualToolAdapter (QString uid) | |
| ManualToolAdapter (ToolPtr base) | |
| virtual | ~ManualToolAdapter () |
| virtual std::set< Type > | getTypes () const |
| virtual vtkPolyDataPtr | getGraphicsPolyData () const |
| get geometric 3D description More... | |
| virtual bool | isCalibrated () const |
| a tool may not be calibrated, then no tracking is allowed More... | |
| virtual ProbePtr | getProbe () const |
| virtual Transform3D | getCalibration_sMt () const |
| get the calibration transform from tool space to sensor space (where the spheres or similar live) More... | |
| virtual std::map< QString, Vector3D > | getReferencePoints () const |
| void | setBase (ToolPtr base) |
| virtual double | getTooltipOffset () const |
| virtual void | setTooltipOffset (double val) |
| void | startEmittingContinuousPositions (int msecBetweenPositions) |
 Public Member Functions inherited from cx::ManualTool Public Member Functions inherited from cx::ManualTool | |
| ManualTool (const QString &uid, const QString &name="") | |
| virtual | ~ManualTool () |
| virtual void | setTransformSaveFile (const QString &filename) |
| virtual bool | getVisible () const |
| virtual QString | getUid () const |
| virtual QString | getName () const |
| virtual int | getIndex () const |
| virtual double | getTimestamp () const |
| latest valid timestamp for the position matrix. 0 means indeterminate (for f.ex. manual tools) More... | |
| virtual void | set_prMt (const Transform3D &prMt, double timestamp=-1) |
| virtual void | setVisible (bool vis) |
| if available for this type, set visibility More... | |
| Public Member Functions inherited from cx::ToolImpl | |
| ToolImpl (const QString &uid="", const QString &name="") | |
| virtual | ~ToolImpl () |
| virtual TimedTransformMapPtr | getPositionHistory () |
| get historical positions More... | |
| virtual TimedTransformMap | getSessionHistory (double startTime, double stopTime) |
| virtual Transform3D | get_prMt () const |
| virtual ToolPtr | getBaseTool () |
| virtual ToolPositionMetadata | getMetadata () const |
| virtual const std::map< double, ToolPositionMetadata > & | getMetadataHistory () |
| virtual void | resetTrackingPositionFilter (TrackingPositionFilterPtr filter) |
| virtual bool | isNull () |
| virtual void | addXml (QDomNode &dataNode) |
| virtual void | parseXml (QDomNode &dataNode) |
| virtual bool | hasReferencePointWithId (QString id) |
| Public Member Functions inherited from cx::Tool | |
| Tool (const QString &uid="", const QString &name="") | |
| virtual | ~Tool () |
| virtual bool | hasType (Type type) const |
| virtual bool | isInitialized () const |
Additional Inherited Members | |
| Public Types inherited from cx::Tool | |
| enum | State { tsNONE =0, tsCONFIGURED, tsINITIALIZED, tsTRACKING } |
| enum | Type { TOOL_NONE, TOOL_REFERENCE, TOOL_MANUAL, TOOL_POINTER, TOOL_US_PROBE, TOOL_MICROSCOPE } |
| Signals inherited from cx::Tool | |
| void | toolTransformAndTimestamp (Transform3D matrix, double timestamp) |
| void | toolVisible (bool visible) |
| void | tooltipOffset (double offset) |
| void | toolProbeSector () |
| void | tps (int) |
| Static Public Member Functions inherited from cx::Tool | |
| static vtkPolyDataPtr | createDefaultPolyDataCone () |
| static ToolPtr | getNullObject () |
| Protected Member Functions inherited from cx::ToolImpl | |
| void | createToolGraphic () |
| virtual ToolFileParser::ToolInternalStructurePtr | getToolFileToolStructure () const |
| Protected Attributes inherited from cx::ToolImpl | |
| TimedTransformMapPtr | mPositionHistory |
| Transform3D | m_prMt |
| the transform from the tool to the patient reference More... | |
| TrackingPositionFilterPtr | mTrackingPositionFilter |
| std::map< double, ToolPositionMetadata > | mMetadata |
| vtkPolyDataPtr | mPolyData |
| the polydata used to represent the tool graphically More... | |
| Protected Attributes inherited from cx::Tool | |
| QString | mUid |
| QString | mName |
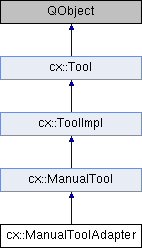
Adapter class for ManualTool.
A ManualToolAdapter inherits from manual tool, but also contains a cx::Tool that is requests shape and probe info from.
Used for debug - when testing tools without a tracking system.
Definition at line 34 of file cxManualToolAdapter.h.
|
explicit |
Definition at line 18 of file cxManualToolAdapter.cpp.
|
explicit |
Definition at line 27 of file cxManualToolAdapter.cpp.
|
virtual |
Definition at line 32 of file cxManualToolAdapter.cpp.
|
virtual |
get the calibration transform from tool space to sensor space (where the spheres or similar live)
Reimplemented from cx::ManualTool.
Definition at line 80 of file cxManualToolAdapter.cpp.
|
virtual |
get geometric 3D description
Reimplemented from cx::ManualTool.
Definition at line 65 of file cxManualToolAdapter.cpp.
|
virtual |
Definition at line 75 of file cxManualToolAdapter.cpp.
|
virtual |
Reimplemented from cx::ManualTool.
Definition at line 85 of file cxManualToolAdapter.cpp.
|
virtual |
Reimplemented from cx::ToolImpl.
Definition at line 90 of file cxManualToolAdapter.cpp.
|
virtual |
Reimplemented from cx::ManualTool.
Definition at line 100 of file cxManualToolAdapter.cpp.
|
virtual |
a tool may not be calibrated, then no tracking is allowed
Reimplemented from cx::ManualTool.
Definition at line 70 of file cxManualToolAdapter.cpp.
| void cx::ManualToolAdapter::setBase | ( | ToolPtr | base | ) |
Definition at line 36 of file cxManualToolAdapter.cpp.
|
virtual |
Reimplemented from cx::ToolImpl.
Definition at line 95 of file cxManualToolAdapter.cpp.
| void cx::ManualToolAdapter::startEmittingContinuousPositions | ( | int | msecBetweenPositions | ) |
Definition at line 107 of file cxManualToolAdapter.cpp.
 1.8.17
1.8.17